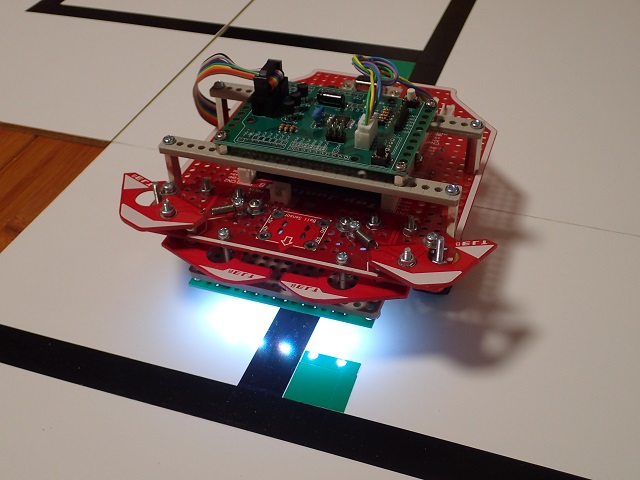
儗僗僉儏乕儔僀儞偱偼2015擭儖乕儖偐傜乽岎嵎揰儅乕僇乿偑搊応偟傑偟偨丏 僐乕僗偺岎嵎揰偵25mm亊25mm偺椢怓偺報偑偁傝丆儘儃僢僩偼偙偺報傪尒偰 岎嵎揰偱偳偪傜偵嬋偑傞偺偐丠捈恑偡傞偺偐丠U僞乕儞偡傞偺偐丠傪敾抐偡傞偙偲傪梫媮偝傟傑偡丏
乽岎嵎揰儅乕僇乿傪撉傒庢傠偆偲偡傞偲嵟掅嵍塃偵1屄偢偮寁2屄偺僙儞僒偑梸偟偔側傝傑偡丏 TJ3側偳偱巊梡偱偒傞僇儔乕僙儞僒偑巗斕偝傟偍傝偙傟偱懳墳壜擻偱偡偑丆暋悢巊偆偵偼彮偟壙奿偑崅偄偲偄偆偙偲傕偁傝帺嶌偟偰傒傑偟偨丏
乮2015擭偵嶌傝傑偟偨偑堦晹偺晹昳偑惗嶻廔椆偵側偭偨偨傔丆2019擭偵夵掶偟傑偟偨丏乯
偙傫側僙儞僒偑梸偟偄丏偲峫偊傑偟偨丏
- 側傞傋偔埨偔丏
- 儅乕僇傪尒摝偝側偄傛偆偵偨偔偝傫偺僙儞僒傪晅偗偨偄丏
- 儘儃僢僩偺擖椡抂巕傪偨偔偝傫巊偆偺偼僀儎丏
- 椢怓偼摉慠偲偟偰丆椢怓埲奜偺儅乕僇偱傕巊偄偨偄丏
- 偳偆偣側傜丆敀崟偺儔僀儞傕堦弿偵尒偨偄丏
- 僾儘僌儔儉偼側傞傋偔娙扨偵嶌傝偨偄丏
偙傫側僙儞僒傪嶌傠偆偐丏偲峫偊偰嶌傝巒傔傑偟偨丏
- 僐僗僩掅尭偺偨傔丆愱梡偺僇儔乕僙儞僒IC偼巊梡偣偢丆僼儖僇儔乕LED偲僼僅僩僩儔儞僕僗僞偱僙儞僒傪峔惉丏
- 僙儞僒傪5慻暲傋偰幚憰丏
- 儘儃僢僩偲偼I2C偱捠怣丏
- 弌椡抣偼怓憡丏
- 偮偄偱偵柧埫偐傜敀崟儔僀儞傕専弌丏
- Arduino屳姺婡丏
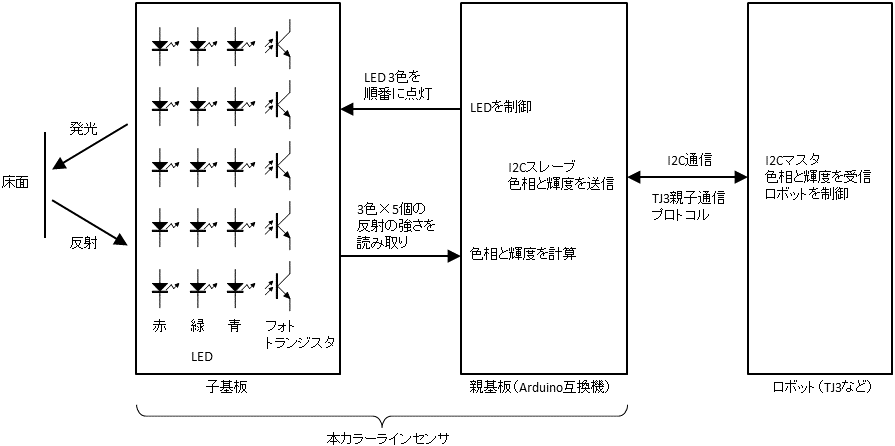
彴柺偵岦偗偨愒丆椢丆惵偺3怓偺LED傪弴斣偵揰摂偟丆偦偺斀幩岝傪僼僅僩僩儔儞僕僗僞偱庴岝偟偰揹埑偵曄姺偟傑偡丏 LED偺揰摂惂屼偲斀幩岝乮揹埑乯偐傜怓憡偲婸搙傪媮傔傞寁嶼偼Arduino屳姺偺恊婎斅偱張棟偟傑偡丏 傑偨丆恊婎斅乮Arduino屳姺婡乯偼儘儃僢僩乮TJ3側偳乯偵怓憡丒婸搙偺僨乕僞傪憲怣偟傑偡丏
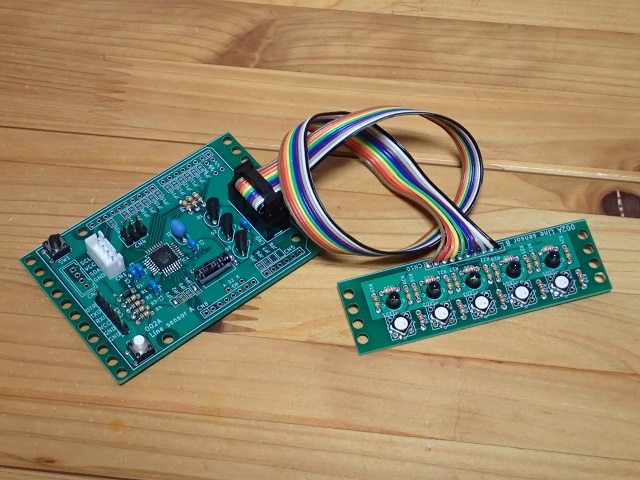
幚嵺偺夞楬恾丆晹昳昞丆婎斅恾偼偙偺傛偆偵偟傑偟偨丏
慻傒棫偰曽偼偙偪傜丏
巕婎斅偵巊梡偡傞LED偼丆3怓暲傋傞偲偐偝挘傞偺偱3怓偑1懱偵側偭偨僼儖僇儔乕LED傪巊梡偟傑偡 乮憓擖幚憰偺OSTA71A1D-A傑偨偼丆昞柺幚憰偺OSTVAVS4C2B偱偡乯丏 僼僅僩僩儔儞僕僗僞偼壜帇岝梡偺NJL7502L偱偡丏
恊婎斅偼Arduino屳姺偲偟傑偡偑丆 僙儞僒5屄傪偦偺傑傑A/D曄姺擖椡抂巕偵愙懕偡傞偨傔偵儅僀僐儞偼Arduino UNO偵巊梡偝傟偰偄傞憓擖幚憰偺ATMEGA328P-PU偱偼側偔 昞柺幚憰偺ATMEGA328P-AU傪巊梡偟傑偡丏傑偨丆晹昳戙愡栺偺偨傔僔儕傾儖捠怣夞楬偼幚憰偟偰偄傑偣傫丏 寢壥偲偟偰Arduino Pro乮5V丆16MHz屳姺乯屳姺偲側傝傑偡丏
慻傒棫偰屻
惢嶌偟偨婎斅傪Arduino屳姺婡偲偟偰摦嶌偝偣傞偨傔偵偼儅僀僐儞乮ATMEGA328P-AU乯偵僸儏乕僘價僢僩偲僽乕僩儘乕僟偺彂偒崬傒偑昁梫偱偡丏 AVR儅僀僐儞偺奐敪娐嫬Atmel Studio丆AVR儅僀僐儞偺彂偒崬傒婍ATMEL-ICE-BASIC側偳丆Arduino奐敪娐嫬偺Arduino IDE傪弨旛偟丆壓婰偺庤弴偱幚巤偟傑偡丏
- 僽乕僩儘乕僟ATmegaBOOT_168_atmega328.hex傪彂偒崬傓
- 僸儏乕僘價僢僩偵EXTENDED 0x05丆HIGH 0xDA丆LOW 0xFF傪彂偒崬傓
- 儘僢僋價僢僩偵0x0F傪彂偒崬傓
怓傪悢抣偱昞偡曽朄偼偄偔偮偐偁傝傑偡偑丆崱夞偼RGB偲怓憡乮Hue乯傪巊偄傑偡丏 RGB偼丆愒乮Red乯丆椢乮Green乯丆惵乮Blue乯3尨怓偦傟偧傟偺嫮偝偱怓傪昞偟傑偡丏怓憡偼怓傪弴斣偵墌宍偵暲傋偰妏搙偱怓傪昞偟傑偡丏
崱夞偺僙儞僒偱偼僼儖僇儔乕LED偺3怓傪弴斣偵揰摂偟偰偦傟偧傟偺斀幩岝傪僼僅僩僩儔儞僕僗僞偱揹埑偵曄姺偟偰Arduino偺A/D曄姺婍偱撉傒崬傓偺偱丆 摼傜傟傞悢抣偼RGB偲側傝傑偡丏乮斀幩岝偺嫮偝偲僼僅僩僩儔儞僕僗僞偺弌椡揹埑偲RGB偑儕僯傾偵懳墳偡傞偺偐偲偄偆栤戣偼偁傝傑偡偑丆奣偹偆傑偔偄偒傑偡丏乯
偙傟傪偦偺傑傑TJ3偵憲偭偰傕傛偄偺偱偡偑丆偦偆偡傞偲3怓亊5僙儞僒偱15屄偺僨乕僞傪憲傞昁梫偑偁傞偙偲偲丆 TJ3偺僾儘僌儔儉奐敪娐嫬C-Style偱寁嶼僾儘僌儔儉傪彂偔偺偼戝曄偱偁傞偙偲偐傜丆Arduino懁偱RGB傪怓憡偵曄姺偟偰偐傜憲傞偙偲偵偟傑偡丏 儘儃僢僩乮TJ3側偳乯偼僙儞僒1偮偁偨傝1偮偺悢抣傪庴偗庢傝丆偦偺戝偒偝偩偗偱怓傪敾暿偱偒傞傛偆偵側傝傑偡丏
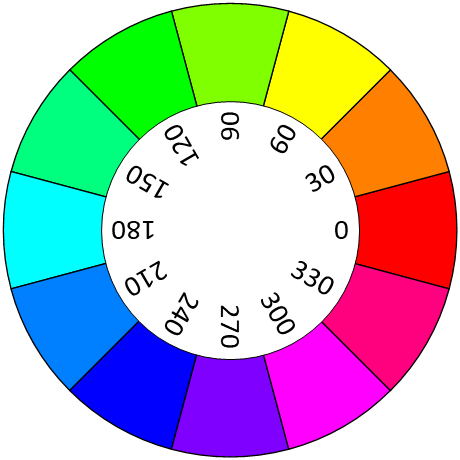
怓憡乮怓憡娐乯偺椺丏
椢偼90亱乣180亱偔傜偄偵側傝傑偡丏
RGB偐傜怓憡乮H乯傪媮傔傞幃偼丆
tanH=(√3(G - B)) / (2R - G - B)
側偺偱偡偑丆娙扨側戙梡偺幃偑偁傞偺偱偙傟傪巊偄傑偡丏
R丆G丆B偺拞偐傜丆max乮嵟戝抣乯偲min乮嵟彫抣乯傪媮傔偰丆
max = min偺偲偒丆
H = 0
max = R偺偲偒丆
H = (60 * (G - B) / (max - min) + 360) mod 360
max = G偺偲偒丆
H = (60 * (B - R) / (max - min)) + 120
max = B偺偲偒丆
H = (60 * (R - G) / (max - min)) + 240
偲偟傑偡丏
幚嵺偺夞楬偱偼LED傗僼僅僩僩儔儞僕僗僞傗偦偺懠晹昳側偳偵摿惈偺僶儔偮偒偑偁傞偨傔丆曗惓偺張棟偑昁梫偱偡丏 崱夞偼婎斅忋偺僞僋僩僗僀僢僠乮SW2乯傪墴偡偲曗惓抣傪寁嶼偟EEPROM偵曐懚偡傞傛偆偵偟傑偡丏 儕僙僢僩帪偵EEPROM偐傜曗惓抣傪撉傒弌偟丆寁嶼偵揔梡偟傑偡丏
TJ3偵偼丆暋悢偺TJ3傪愙懕偟偰I/O傪憹愝偡傞婡擻偑偁傝傑偡丏捠怣偼I2C偱1戜偑儅僗僞乮恊婡乯丆懠偺TJ3偑僗儗乕僽乮巕婡乯偲側傝傑偡丏 I2C偼懡偔偺儅僀僐儞傗僙儞僒偱巊梡偝傟傞堦斒揑側捠怣偱偡丏 Arduino偱TJ3偺巕婡偺儅僱傪偟偰捠怣偡傟偽丆TJ3偺恊婡偐傜偼TJ3偺巕婡偑宷偑偭偰偄傞偺偲摨偠傛偆偵尒偊傑偡丏 崱夞偼偙傟傪棙梡偟偰TJ3偱僙儞僒偺僨乕僞傪撉傔傞傛偆偵偟傑偡丏
嶌惉偟偨Arduino梡偺僾儘僌儔儉偼偙偪傜偱偡丏
Arduino IDE偐傜僾儘僌儔儉傪彂偒崬傓偵偼丆USB僔儕傾儖曄姺傾僟僾僞偲USB働乕僽儖傪巊梡偟傑偡丏
TJ3B偱偺巊偄曽傪徯夘偟傑偡丏
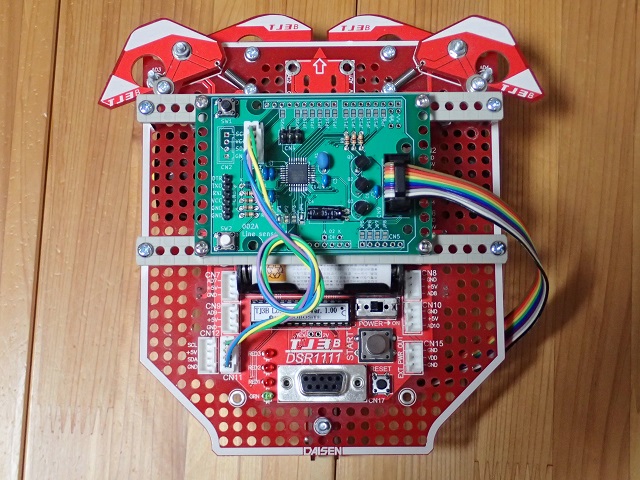
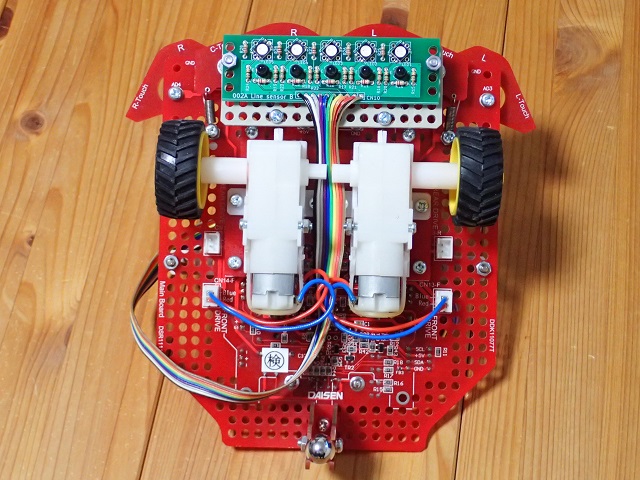
僇儔乕儔僀儞僙儞僒偺恊婎斅偲巕婎斅傪TJ3B偵庢傝晅偗丆恊婎斅偺CN1傑偨偼CN2偲TJ3B偺CN11傑偨偼CN12傪4嬌偺働乕僽儖偱愙懕偟傑偡丏
偙偺僇儔乕儔僀儞僙儞僒偼TJ3B偺巕婡偲摨偠傛偆偵TJ3B偲捠怣偟傑偡丏
偦偺偨傔丆傑偢偼TJ3B偲C-Style傪巕婡偑巊偊傞忬懺偵愝掕偟傑偡丏
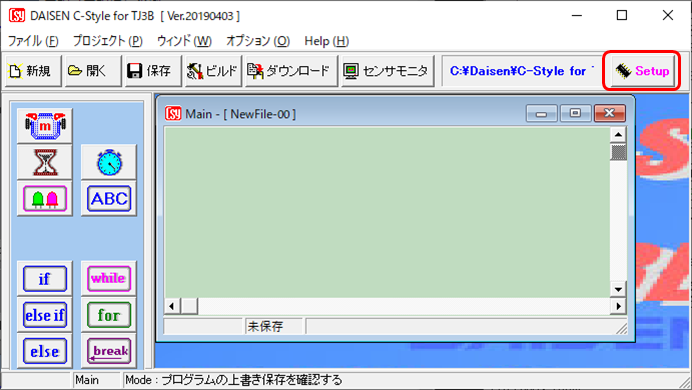
僷僜僐儞偱C-Style傪婲摦偟丆僂傿儞僪僂偺塃忋偵偁傞乽Setup乿儃僞儞傪墴偟偰Setup僂傿儞僪僂傪弌偟傑偡丏
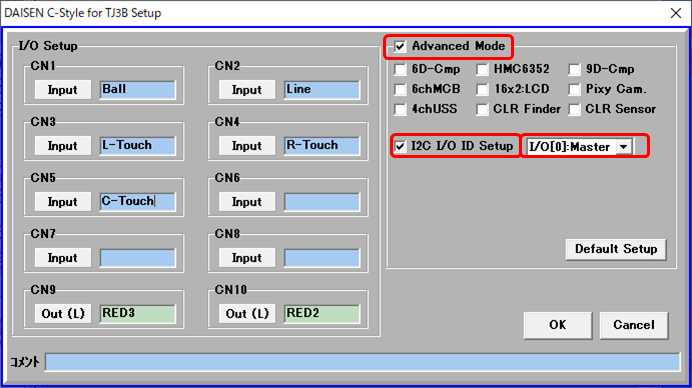
Setup僂傿儞僪僂偱乽Advanced Mode乿偵僠僃僢僋傪擖傟傑偡丏 師偵弌偰偒偨乽I2C I/O ID Setup乿偵傕僠僃僢僋傪擖傟丆偦偺椬偺僾儖僟僂儞儊僯儏乕偼 乽I/O[0]:Master乿偵愝掕偟傑偡丏
偙傟偱C-Style偱巕婡傪巊偭偨僾儘僌儔儉傪彂偔弨旛偑偱偒傑偟偨丏
C-Style偺愝掕偑廔傢偭偨忬懺偱TJ3B偵僾儘僌儔儉傪僟僂儞儘乕僪偡傞偲丆 TJ3B偑巕婡偲捠怣偡傞傛偆偵側傝傑偡丏
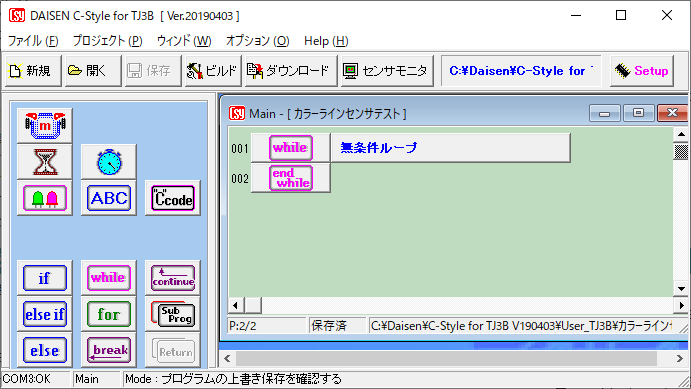
偲傝偁偊偢丆嬻偺柍尷儖乕僾偺僾儘僌儔儉傪價儖僪丆僟僂儞儘乕僪偟傑偡丏
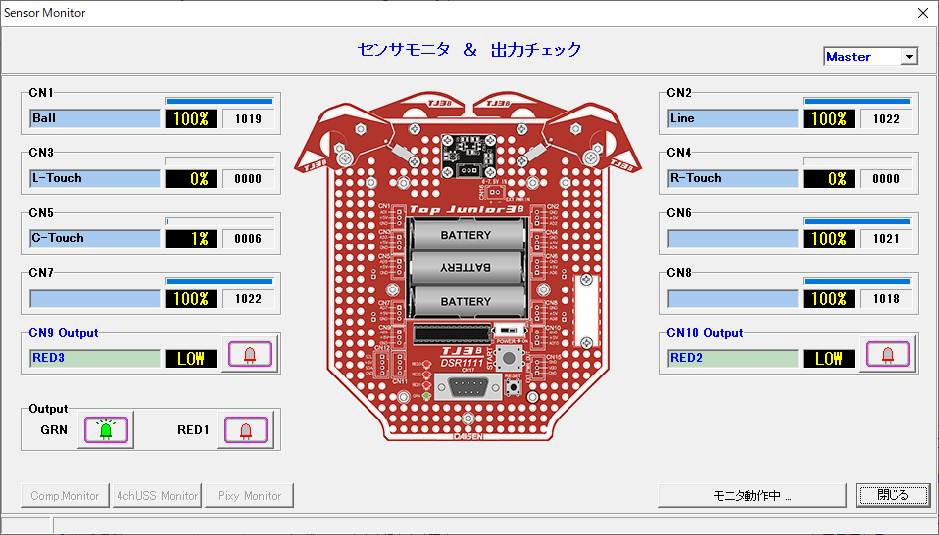
TJ3B偺揹尮傪ON偟丆僙儞僒儌僯僞傪婲摦偟偰丆傑偢乽儌僯僞奐巒乿儃僞儞傪墴偟傑偡. TJ3B乮恊婡乯偺奺僙儞僒偺抣偑昞帵偝傟傑偡丏
師偵塃忋偺僾儖僟僂儞儊僯儏乕偱乽Master乿傪乽Sub I/O[1]乿偵曄峏偡傞偲巕婡偱偁傞僇儔乕儔僀儞僙儞僒偺抣偑昞帵偝傟傑偡丏
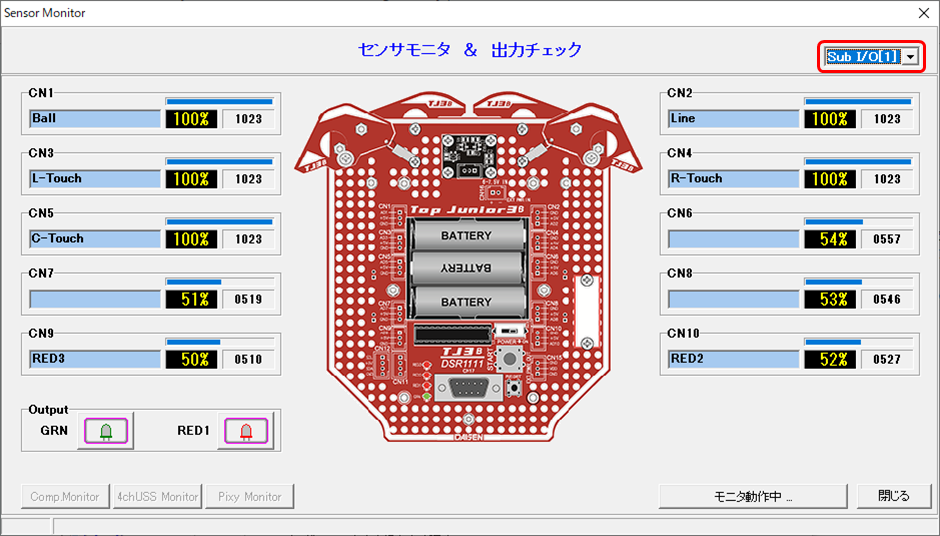
嵟弶偼惓偟偄抣偑昞帵偝傟側偄偺偱丆僙儞僒偺曗惓傪峴偄傑偡丏
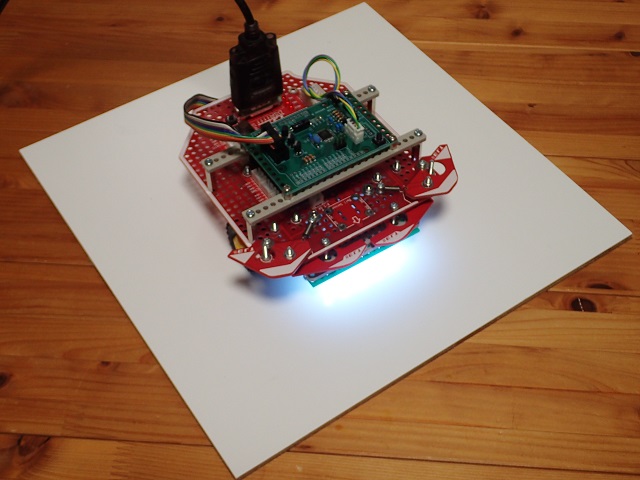
TJ3B傪敀偄彴傗巻偺忋偵抲偄偰丆僙儞僒恊婎斅偺SW2傪墴偟傑偡丏偡傞偲僙儞僒巕婎斅偺LED偑愒丆椢丆惵偺弴斣偵揰摂偟傑偡丏
師偵丆僙儞僒恊婎斅偺SW1傪墴偟傑偡丏堦扷LED偑徚摂偟僙儞僒偑嵞婲摦偟傑偡丏
偙傟偱丆曗惓偼姰椆偱偡丏
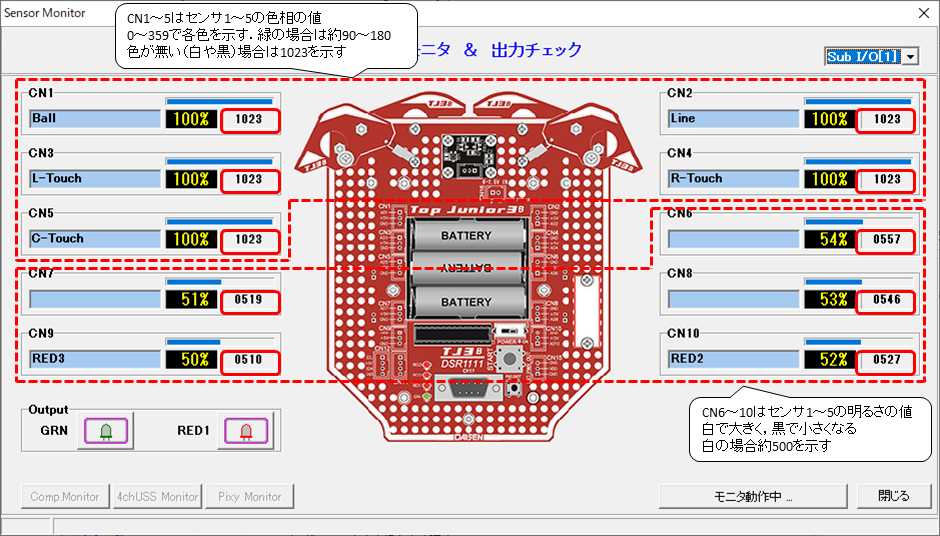
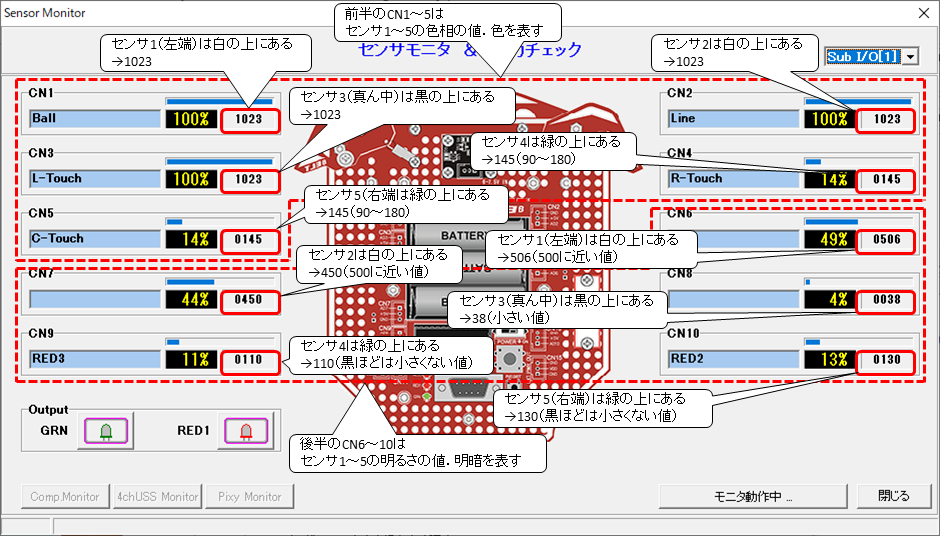
僙儞僒偺曗惓偑姰椆偡傞偲丆敀偄彴偺忋偱偼僙儞僒儌僯僞偺抣偼壓偺恾偺傛偆偵側傝傑偡丏
僙儞僒儌僯僞偱CN1乣CN10偺奺抣偺撪丆慜敿偺CN1乣CN5偑僙儞僒1乣僙儞僒5偺怓偺應掕寢壥偱偡丏
怓憡傪0乣359偺抣偱帵偟丆敀傗崟偱偼怓偑柍偄偺偱1023傪帵偟傑偡丏
屻敿偺CN6乣CN10偼僙儞僒1乣僙儞僒5偺柧傞偝偺應掕寢壥偱偡丏
敀偱栺500傪帵偟丆崟偵嬤偯偔偵偮傟彫偝側抣傪帵偟傑偡丏
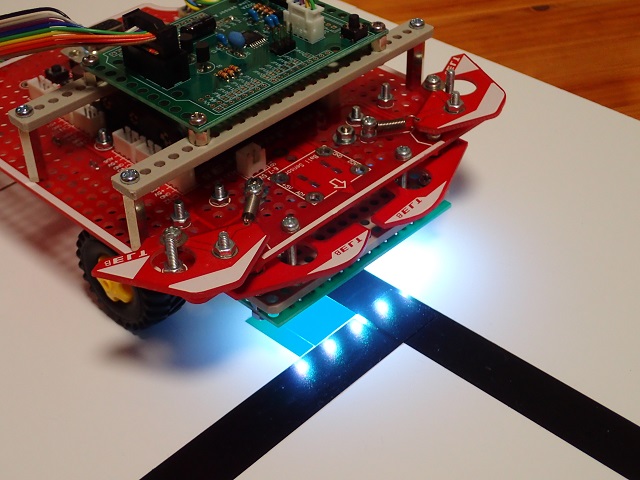
師偵丆僐乕僗忋偱偺椺偱偡丏
塃懁2偮偺僙儞僒乮僙儞僒4偲5乯偑椢儅乕僋偺忋偵棃傞傛偆偵TJ3B傪抲偒傑偟偨丏
僙儞僒儌僯僞偺抣偼壓偺恾偺傛偆偵側傝傑偡丏
僾儘僌儔儉拞偱僇儔乕儔僀儞僙儞僒偺抣傪巊偄偨偄偲偒傕丆TJ3B偺巕婡偲摨偠傛偆偵巊偊傑偡丏
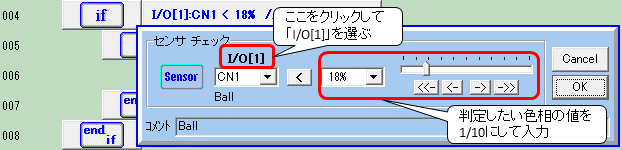
椺偊偽僙儞僒僠僃僢僋柦椷偺応崌丆嵍偺恾偺傛偆偵僐僱僋僞斣崋傪慖傇僾儖僟僂儞儊僯儏乕偺忋傪僋儕僢僋偟偰丆
I/O[1]傪慖傇偙偲偱丆僇儔乕儔僀儞僙儞僒偺抣傪敾掕抣偵巊偊傑偡丏
敾掕抣偼1/10偺抣偱擖椡偟傑偡丏椺偊偽丆怓憡180亱傪敾掕偟偨偄応崌偼18%偲擖椡偟傑偡丏
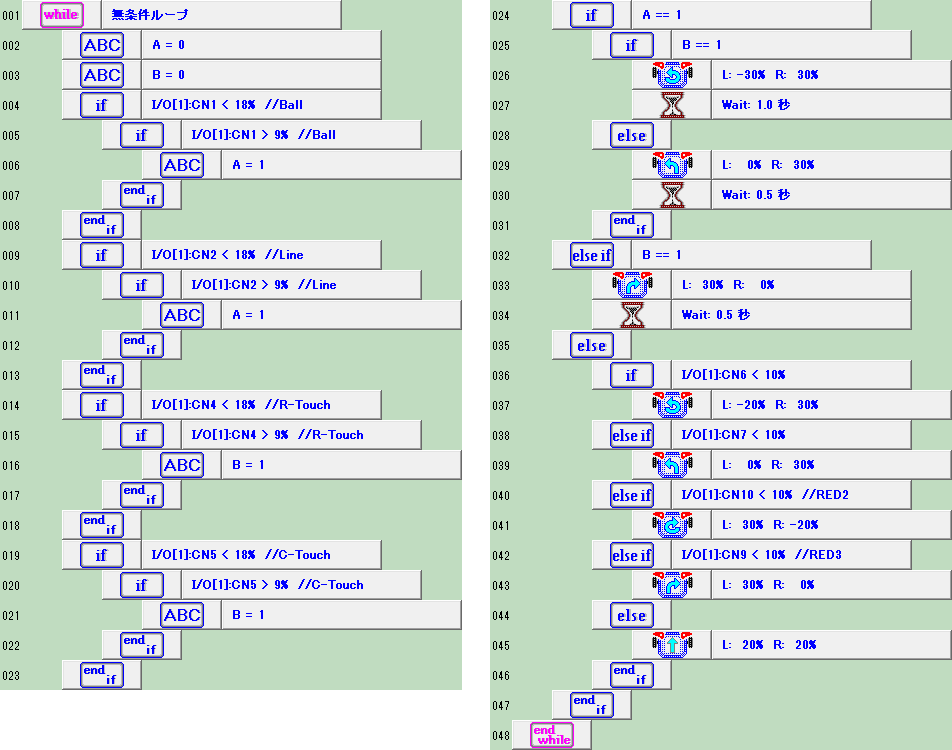
奣偹儔僀儞僩儗乕僗偲椢儅乕僋偺敾掕偑偱偒傞娙扨側僾儘僌儔儉偺椺傪帵偟傑偡丏
乮TJ3B偼揹抮偺揹埑偱儌乕僞偺懍偝偑曄傢傞偺偱丆揔媂僾儘僌儔儉偺挷惍偑昁梫偱偡丏乯
偙偺僇儔乕儔僀儞僙儞僒偵偼僙儞僒偑5慻偁傞偺偱丆2屄摨帪崟偱捈妏僐乕僫傪専弌偟偨傝丆
嵍塃摨帪椢偱U僞乕儞傪敾抐偟偨傝偡傞僾儘僌儔儉傪嶌傞偲傛傝妋幚側憱峴偑偱偒傞傛偆偵側傝傑偡丏
傢傝偲曋棙側僙儞僒偑偱偒偨偺偱偼側偄偐偲巚偄傑偡丏
偙偺僙儞僒偼椢偩偗偱側偔惵偱傕愒偱傕墿偱傕岲偒側怓偺敾掕偵巊梡偱偒傞偺偱丆 儘儃僇僢僾僕儏僯傾偺儗僗僉儏乕儔僀儞嫞媄埲奜偵傕斈梡揑偵揔梡壜擻偱偡丏 偨偩偟丆愒丒椢丒惵偺3怓偺斀幩岝傪弴斣偵應掕偟偰偄傞偙偲偲丆I2C偵傛傞僔儕傾儖捠怣傪巊梡偟偰偄傞偙偲偐傜丆 晛捠偺愒奜慄僼僅僩儕僼儗僋僞偲斾傋傞偲掅懍偱丆偁傑傝懍偄儔僀儞僩儗乕僗偵偼岦偒傑偣傫丏